
「Detail1」変形法による薄板FEM
1.1 微小板要素の変形
まず板の微小要素を考えていきます。
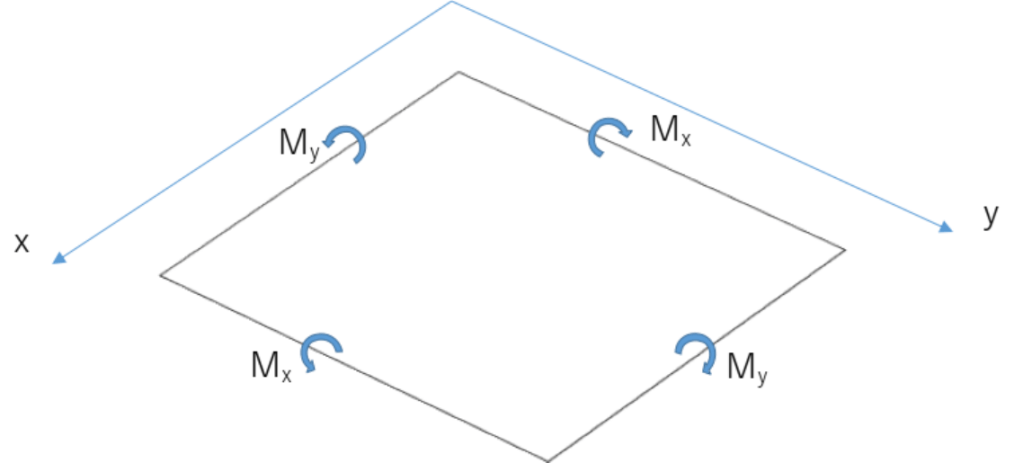
上図のようなモデルを考えた場合の薄板の曲げの基礎方程式は材料力学より以下となります。
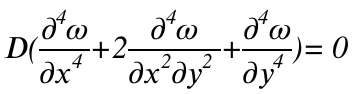
・・・(1)

・・・(2)
E : 板要素の縦弾性係数
t:板厚
ν:板要素のポアソン比
ω:板のz方向の変位
ここで微小板要素内部の変位ω(x,y)を以下のようなxとyの関数で表現出来ると仮定します。ここでc1~c15は境界条件によって定まる定数で、境界条件と共に変化する定数です。
ω(x,y) = c1+c2x+c3y+c4x2+c5xy+c6y2+c7x3+c8x2y+c9xy2+c10y3+c11x3y+c12xy3+c13x4+c14x2y2+c15y4
((1)式の形状より上記関数の次数は4次が上限になります)
しかし境界条件としては板要素端点のz方向変位、x方向傾き、y方向傾きから12の情報となり、この観点から15項を12項に絞ります(参考文献[1])。
ω(x,y) = c1+c2x+c3y+c4x2+c5xy+c6y2+c7x3+c8x2y+c9xy2+c10y3+c11x3y+c12xy3 ・・・(3)
参考文献[1]に従い、具体的な計算を進めていきます。
変位の境界条件から上記変数c1~c12を計算するのですが、まず以下の準備を行います。
ω(x,y)={N(x,y)}{δ} ・・・(4)
{δ}={ω1、ωx1、ωy1、ω2、ωx2、ωy2、ω3、ωx3、ωy3、ω4、ωx4、ωy4}T :変位の境界条件
但しωx1=∂ω1/∂x・・・etc
{N(x,y)}:境界条件を入力とし、変位ω(x,y)を出力します。以後変位関数と呼びます
(3)式より
∂ω(x,y)/∂x = 0+c2+0 +2c4x+c5y+0 +3c7x2+2c8xy+c9y2 +0 +3c11x2y+c12y3 ・・・(5)
∂ω(x,y)/∂y = 0+0+c3 +0+c5x+2c6y +0 +c8x2+2c9xy +3c10y2+c11x3 +3c12xy2 ・・・(6)
例えば各点の(x,y)座標が点1(0,0)、点2(0,1)、点3(1,0)、点4(1,1)の場合、
(3)(5)(6)式にx、y座標の値を代入することで以下が得られます。
ω1= c1+0+0 +0+0+0 +0+0+0 +0+0+0
ωx1=0+c2+0 +0+0+0 +0+0+0 +0+0+0
ωy1=0+0+c3 +0+0+0 +0+0+0 +0+0+0
ω2= c1+0+c3 +0+0+c6 +0+0+0 +c10+0+0
ωx2=0+c2+0 +0+c5+0 +0+0+c9 +0+0+c12
ωy2=0+0+c3 +0+0+2c6 +0+0+0 +3c10+0+0
ω3 =c1+c2+0 +c4+0+0 +c7+0+0 +0+0+0
ωx3=0+c2+0 +2c4+0+0 +3c7+0+0 +0+0+0
ωy3=0+0+c3 +0+c5+0 +0+c8+0 +0+c11+0
ω4 = c1+c2+c3 +c4+c5+c6 +c7+c8+c9 +c10+c11+c12
ωx4= 0+c2+0 +2c4+c5+0 +3c7+2c8+c9 +0+3c11+c12
ωy4= 0+0+c3 +0+c5+2c6 +0+c8+2c9 +3c10+c11+3c12
まとめますと
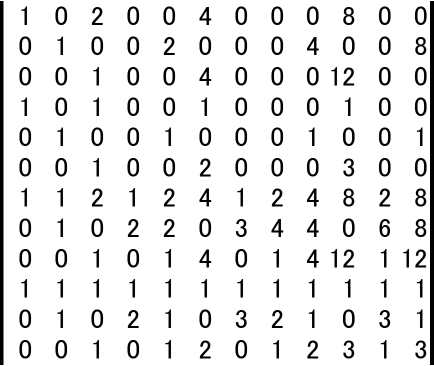
{δ}=[C]{c}
但し(編集ソフトウエアの都合、縦棒はカッコを示しています)
{δ}={ω1、ωx1、ωy1、ω2、ωx2、ωy2、ω3、ωx3、ωy3、ω4、ωx4、ωy4}T
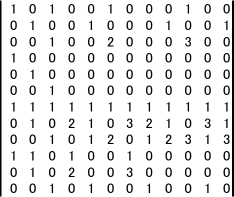
[C]=
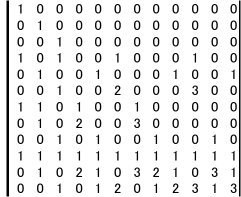
{c}={c0,c1,c2,c3,c4,c5,c6,c7,c8,c9,c10,c11,c12}T ・・・(7)
(3)式と(7)式より
ω(x,y) ={ 1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3 }{c}
={ 1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3 }[C]-1{δ}
よって変位関数は以下となります。
{N(x,y)}={ 1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3 }[C]-1 ・・・(8)
1.2 微小板要素の曲げモーメント
材料力学より
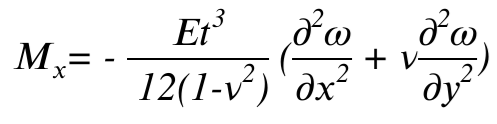
(Mxy:x平面上のy方向せん断力による曲げモーメント)
行列表示にします。

=[D]*{ε} ・・・(9)
{ε} = { -∂2ω/∂x2、-∂2ω/∂y2、2*∂2ω/∂x∂y}
上式を変位関数を用いて表現すると
-∂2ω/∂x2 = -2c4-6c7x-2c8y-6c11xy
-∂2ω/∂y2 = -2c6-2c9x-6c10y-6c12xy
2*∂2ω/∂x∂y = c5+4c8x+4c9y+6c11x2+6c12y2
行列で表現すると
{ε} = [Q]{c} ・・・(10)
[Q] =

・・・(11)
(7)式の逆行列により
{c}=[C]-1{δ} ・・・(12)
(11)式を(9)式に代入すると
{ε} = [Q][C]-1{δ} ・・・(13)
(13)式を(9)式に代入することで下記剛性行列(入力が変位δで出力が曲げモーメント)の形を作ることが出来ます。
すなわち
{Mx,My,Mxy}T =[D]{ε}=[D] [Q][C]-1{δ} ・・・(14)
ところがこの式には大きな問題があります。(14)式の左辺{Mx,My,Mxy}Tと右辺の{ω,ωx,ωy}では扱っている座標の方向が違います。座標の方向が違っていては運動解析には使えません。
そこで剛性行列の定義をやり直します。
すなわち微小板要素内での内部応力の行う仕事量を積分で算出し((15)式左辺積分)、それを代表点の変位{δ}で割ることで{δ}に対応した荷重、曲げモーメントを算出します。ここまでは厳密な計算でしたが、ここからは変位点での平均的な荷重を求めるという大きな方針転換を行います。
内部応力仕事量= 1/2*∫{ε}T[σ]dv = 1/2*∫{δ}T[C]-T[Q]T[D][Q][C]-1{δ}dxdy ・・・(15)
(dvのうち、dzは[D]の計算で先行して行われているためdxdyに変わっています)
(1/2はひずみエネルギーの係数、[σ]={Mx,My,Mxy}T)
(15)式を{δ}で割ったものが{δ}に対応した荷重{Fz,Mx,My}となります。
{Fz,Mx,My} = [C]-T∫[Q]T[D][Q]dxdy[C]-1{δ} ・・・(16)
結果、剛性行列は以下となります。
[K] = [C]-T∫[Q]T[D] [Q]dxdy[C]-1 ・・・(17)
後述の質量行列[M]の定義も(15)(16)(17)式と同じとなります。変位関数により微小要素内での変位量と慣性力を定義し、微小要素体積内で積分します。それを節点変位の2次微分で割ることで疑似的な質量を定義しています。よって質量行列は微小要素全体での慣性力を節点変位を変数に置き換えた場合の仮想質量と考えることが出来ると思います。
2.1 1要素板の計算
ここで下図のようなモデルの具体的な計算例を示します。

E:ヤング率 7e10[Pa]
ρ:密度 2800[kg/m3]
L:要素の縦長さ 1[m] ・・・(18)
t:厚さ 10[mm]
ν:ポアソン比 0.3
節点座標:P1=(0,1)、P2=(0,0)、P3=(1,1)、P4=(1,0)
要素1(図左側の正方形)について[K]と[M]を求めていきます。
(7)式の計算により(但し節点の順番が変わっています)
[C] =
続いて(17)式の積分の中を計算していきます。
D1=Et3/(12(1-ν2))として
[D][Q]=D1*

=

・・・(19)
更に[Q]Tを加えると
[Q]T[D] [Q]=D1*

・・・(20)
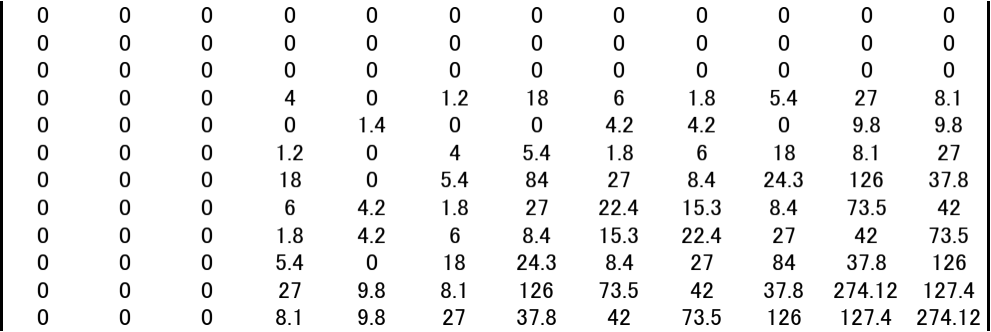
(20)式を要素1の面積で積分します。
尚積分範囲はx=0~1、y=0~1となり、且つxとyは独立変数であるため積分は容易です。
(ν=0.3を代入します)
∫[Q]T[D] [Q]dxdy=D1*
・・・(21)
(21)式を(17)式に代入すると要素1の剛性行列[K]となります。
尚本計算は手計算では厳しいため、Scilabを使っています。
[K] = [C]-T[(21)式][C]-1 =D1*

・・・(22)
続いて質量行列[M]を求めていきます。
参考文献[1]の定義式より
[M]=∫{N}T{N}ρdv
=[C]-T∫{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3}T{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3}ρdxdydz[C]-1
・・・(23)
まず積分の中身を計算します。
{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3}T{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3} =

・・・(24)
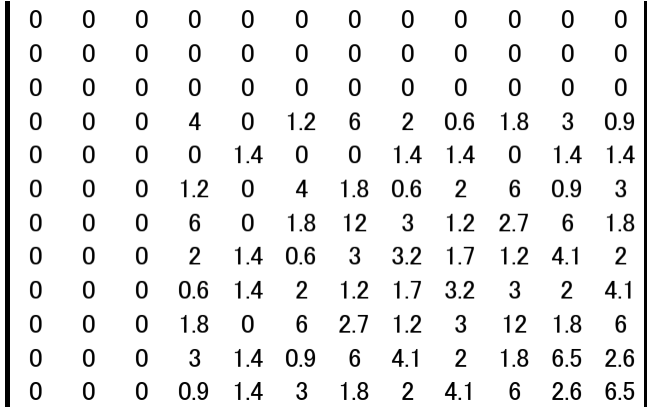
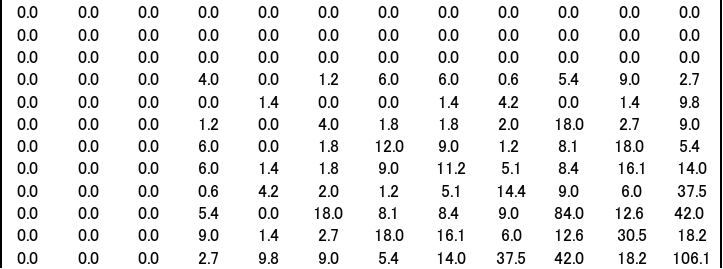
(24)式を要素1の面積で積分します。
尚積分範囲はx=0~1、y=0~1となり、且つxとyは独立変数であるため積分は容易です。
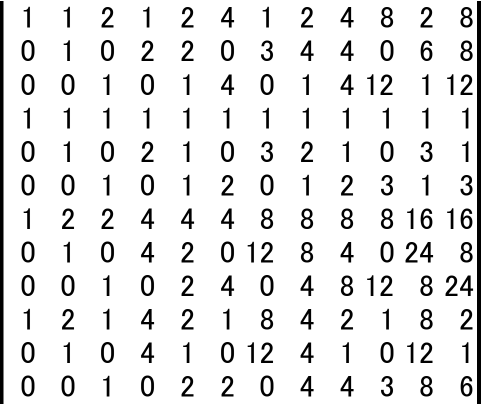
∫{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3}T{1 x y x2 xy y2 x3 x2y xy2 y3 x3y xy3}dxdy=

・・・(25)
(25)式を[C]-Tと[C]-1で挟みます(この計算も手計算では厳しいのでScilabを用いました)。
[C]-T[(25)式][C]-1=
・・・(26)
以上より質量行列[M]は以下となります。
[M] = ρt*
・・・(27)
剛性行列[K]と質量行列[M]が求められたので、単振動バネと同じように固有値が求められます。
固有値計算の前に拘束条件を計算に含めます。
点1と点2を拘束するとします。そうすると境界条件として以下となります。
{ω1、ωx1、ωy1、ω1、ωx1、ωy1} = {0} ・・・(28)
この境界条件により[K][M]の1~6行、1~6列は計算する必要がなくなります(「0」で固定)。
この点を反映した剛性行列と質量行列を[Kf]、[Mf]とすると
[Kf]=D1*
・・・(29)
[Mf]=ρt*
・・・(30)
SciabのコマンドKM=[M]-1[K]、[P,D]=spec(KM)を用いて計算した結果を以下に示します。
P=
・・・(31)
D=
・・・(32)
D=ω2、ω=2πfより
f=

・・・(33)
(33)式の確からしさを梁の理論式より確認します。
梁の固有振動数に関する理論式(参考文献[2])

・・・(34)
固定-自由端 λ1=1.875、λ2=4.694、λ3=7.855、λ4=10.996
∴ f1=8.08Hz、f2=50.62Hz、f3=141.74Hz、f4=277.76Hz ・・・(35)
(33)式の最小振動数f=8.00Hzは上記1次モードと十分一致しており、有限要素による解法の妥当性が示せたと考えます(さすがに1要素では2次モード以降は一致しないようです)。
2.2 4要素板の計算
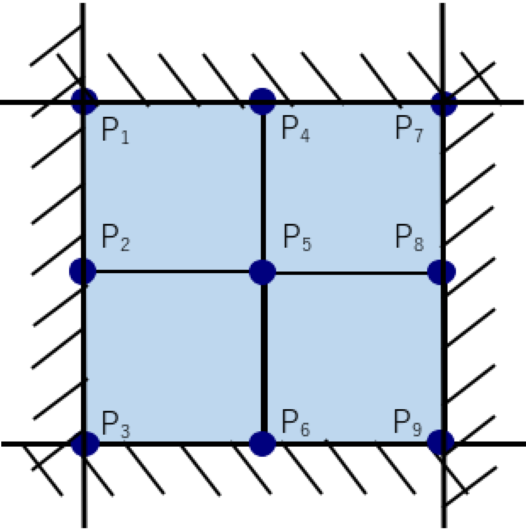
前項の1要素を4つに増やし、更に拘束を全周に施した下図のようなモデルの具体的な計算例を示していきます。
E:ヤング率 7e10[Pa]
ρ:密度 2800[kg/m3]
L:要素の縦長さ 1[m](全体で2x2m) ・・・(36)
t:厚さ 10[mm]
ν:ポアソン比 0.3
節点座標:P1=(0,2)、P4=(1,2)、P7=(2,2)、
P2=(0,1)、P5=(1,1)、P8=(2,1)、
P3=(0,0)、P6=(1,0)、P9=(2,0)
前項の計算と同じように要素1、2、3、4の変位関数の一部である[C1]、[C2]、[C3]、[C4]を計算してみます。これ以降の計算はしつこいような表示となりますが、検算用兼忘備録として示させて頂きます。尚わずか4要素でも行列は27×27行になるため、Scilabで簡単なロジックを組んで計算しました。
[C1]=

[C2]=
[C3]=
[C4]=

・・・(37)
各[Ci]の中を見ると同じような数字が並んではいますが、行列としては別物となっています。
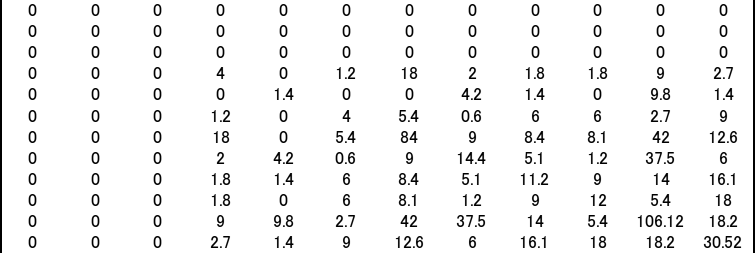
続いて(21)式に対応する各要素の∫[Q]T[D][Q]dxdyを計算します。注意点は各要素で積分範囲が変わる点です。こちらもSilabで計算した結果を示します。
要素1:
∫[Q]T[D][Q]dxdy=D1*
要素2:
∫[Q]T[D][Q]dxdy=D1*

要素3:
∫[Q]T[D][Q]dxdy=D1*
要素4:
∫[Q]T[D][Q]dxdy=D1*
・・(38)
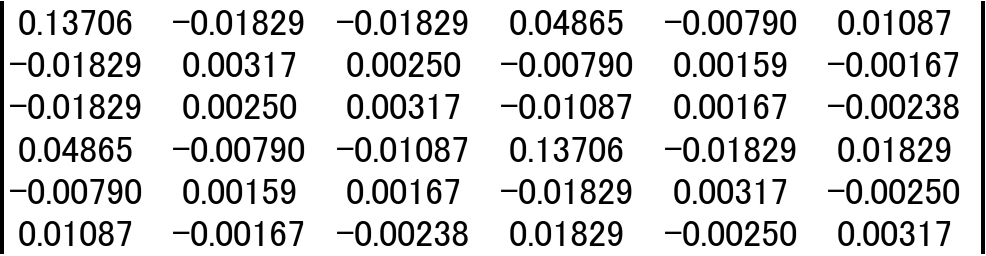
最後に∫[Q]T[D][Q]dxdyを[C]-Tと[C]-1で挟んで剛性行列[K]を求めます。
[K1]=D1*
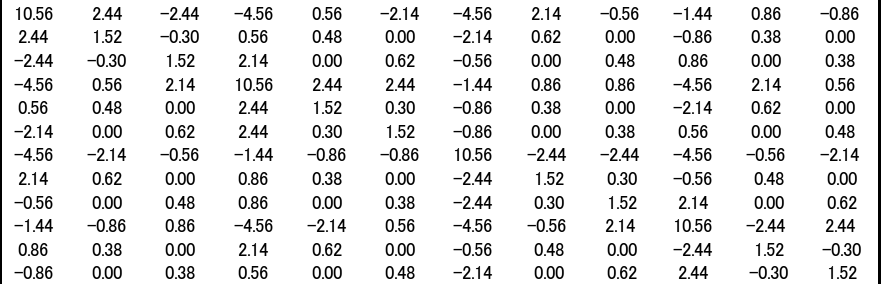
[K2]=D1*
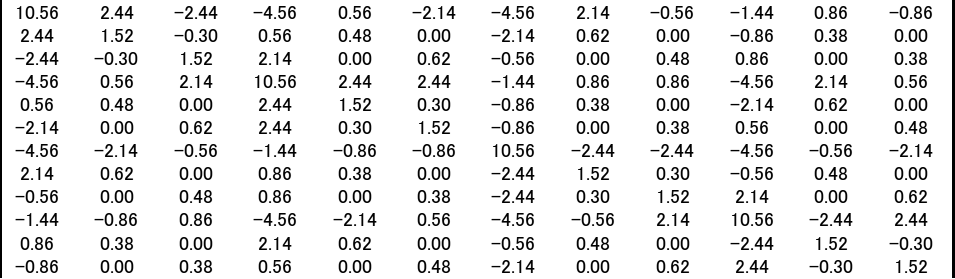
[K3]=D1*

[K4]=D1*

・・・(39)
結果は驚くことに[K1]、[K2]、[K3]、[K4]の全てが一致しています(小数点を下げていくと計算上の桁落ちによると思われる誤差は発生しています)。しかしこれは設定した節点が対称性を持っているため、当然の結果とも考えられます。逆に考えますと対称性を保った要素が集合したモデルの場合、剛性行列はそのうち1つの要素を計算すれば良いことになると考えられます。
続いて質量行列[M]を各要素別に計算します。上述の通り、対称性が保たれているので1つだけ計算すれば良いのですが、念のため個々の要素の積分範囲で計算してみました。
結果は予想通りすべて同じものとなりました。
[M1]=ρt*

[M2]=ρt*

[M3]=ρt*

[M4]=ρt*
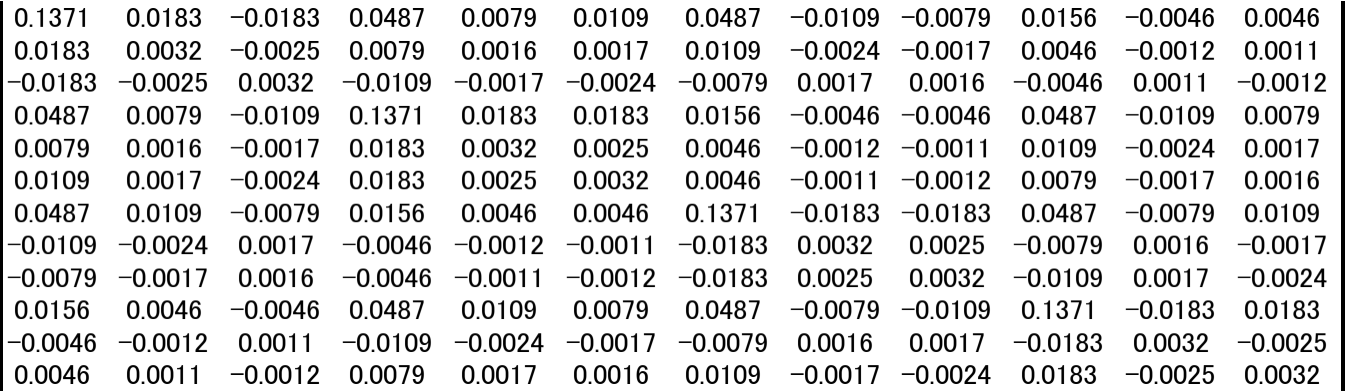
・・・(40)
以上により各要素の剛性行列[Ki]と質量行列[Mi]が求められました。
次のステップとしては1次元梁の時と同様に[Ki]、[Mi]の各要素で節点の重なっている部分を足し合わせていきます。この作業が各要素間の結合を意味します。別の言い方として各要素の[Ki]、[Mi]が同時に成り立つ{δ}を探す作業となります。
足し合わせの様子を以下に示します。P1は{δ1}={ω、ωx1、ωy1}を示しており、K1は上述[K1]を示しています。この足し合わせてにより4要素の結合がなされます。
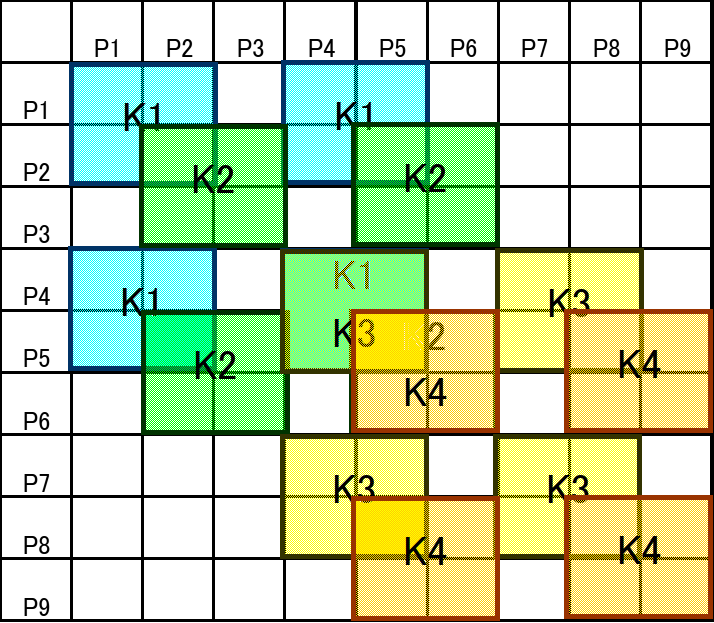
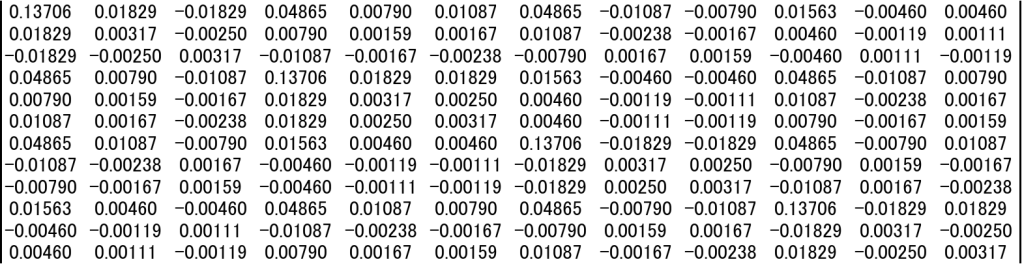
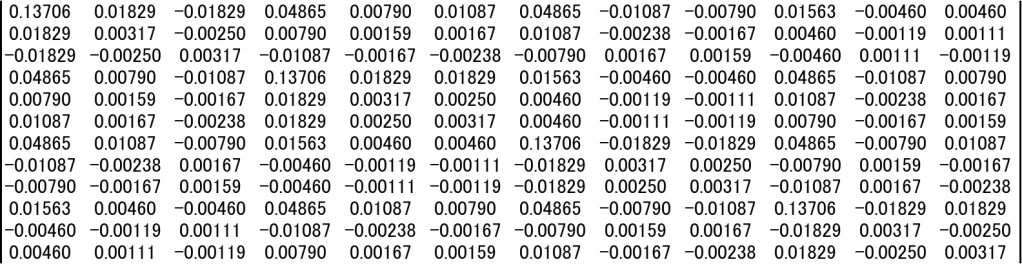
非常に小さくて恐縮ですが、Scilabを用いて計算した全体の剛性行列[K]を示します。
[K]=D1*
・・・(41)
同様に質量行列[M]も計算します。
[M]=ρt*

・・・(42)
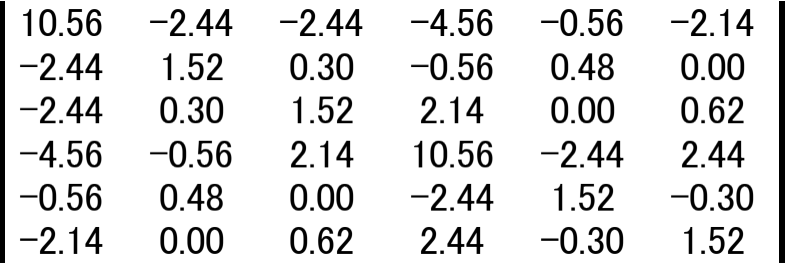
拘束点を点{1,2,3,4,6,7,8,9}とします。そうすると境界条件として以下となります。
{δ1、δ2、δ3、δ4、δ6、δ7、δ8、δ9} = {0} ・・・(43)
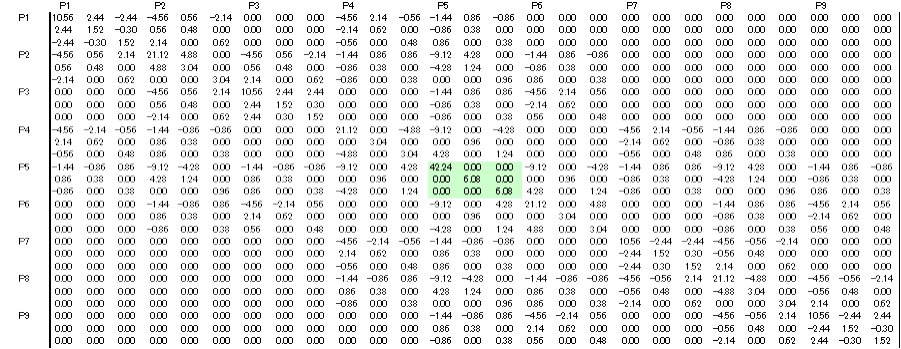
この境界条件により[K](41)、[M](42)のP5の行、P5の列以外は計算する必要がなくなります。
この点を反映した剛性行列と質量行列を[Kf]、[Mf]とすると(41)(42)式中に薄色で着色したところだけ残ることとなります。
[Kf]=D1*

・・・(44)
[Mf]=D1*
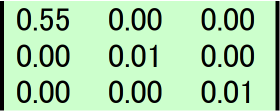
・・・(45)
SciabのコマンドKM=[M]-1[K]、[P,D]=spec(KM)を用いて計算した結果を以下に示します。
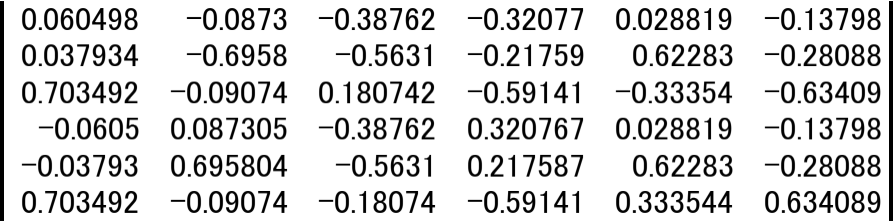
[P]=

・・・(46)
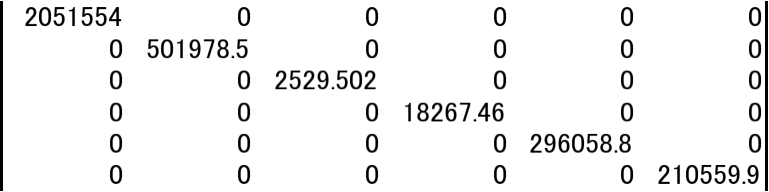
[D]=

・・・(47)
f =
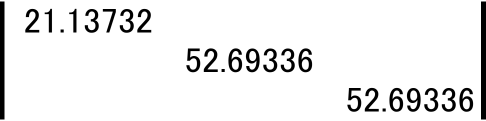
・・・(48)
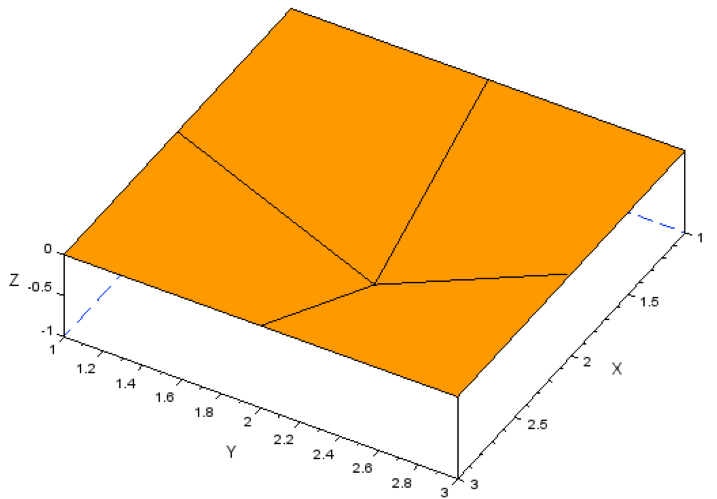
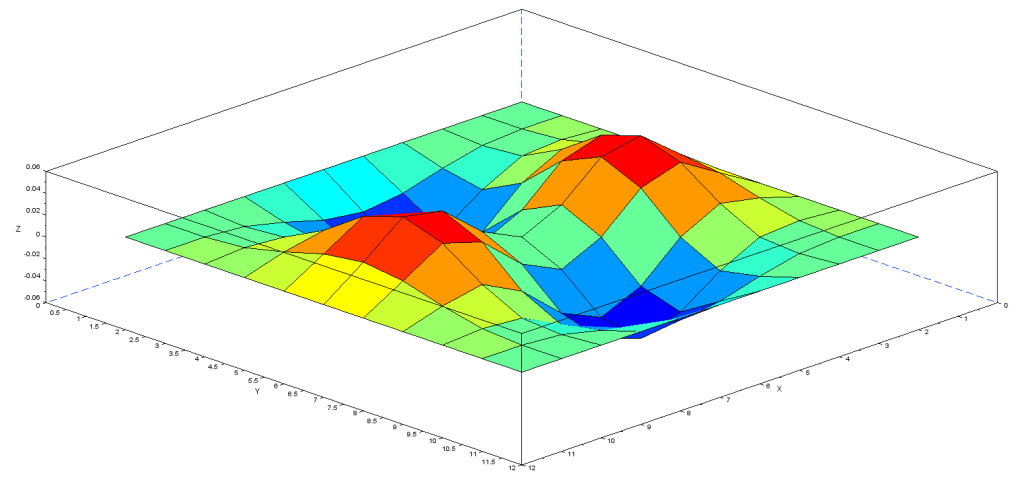
[P]の第1列のうち、ω(Z方向変位)を3次元plotしてみます。これが1次モードの形となります。
(48)式の確からしさを梁の理論式より確認します。
全周固定薄板の固有振動数に関する理論式(参考文献[2])

・・・(49)
固定-自由端 λ12=35.99、λ22=73.41、λ32=108.3
∴ f1=21.67Hz、f2=44.20Hz、f3=65.20Hz・・・(50)
(48)式の最小振動数f=21.14Hzは上記1次モードと十分一致しており、有限要素による解法の妥当性が示せたと考えます(4要素では2次モード以降は一致しないようです)。
2.3 10x10要素板の計算
もう少し要素を増やした計算を実施してみます。500x500x0.5mmのアルミ薄板の周辺を固定した場合の固有振動数をScilabを用いて計算して見ました。結果をモード次数5までを以下に示します。FEMとしては粗い10x10マスでも理論値との十分な一致を示しています。

E:ヤング率 7e10[Pa]
ρ:密度 2800[kg/m3]
L:要素の縦長さ 50[mm](10x10マスで500x500mm) ・・・(51)
t:厚さ 0.5[mm]
ν:ポアソン比 0.3
計算結果

1次モード:固有振動数 17.16Hz(理論値 17.33Hz)

2次モード:固有振動数 34.91Hz(理論値 35.36Hz)

3次モード:固有振動数 50.64Hz(理論値 52.16Hz)
4次モード:固有振動数 62.62Hz(理論値 63.38Hz)

5次モード(z方向反転図):固有振動数 63.00Hz(理論値 63.67Hz)
1次モードでは凸部が一つ、2次モードでは凸部が2つ、3-4次モードでは凹凸部が4つと規則正しく増加していく様子が見て取れます。この解析結果では見ずらいですが5次モードでは5つの凹凸部が形成されます。正方形において対称性を維持しながら凹凸部が増えていくようです。
尚併記した理論計算値は以下の式から計算しました。式は参考文献[2]に拠ります。
固有振動数計算理論式
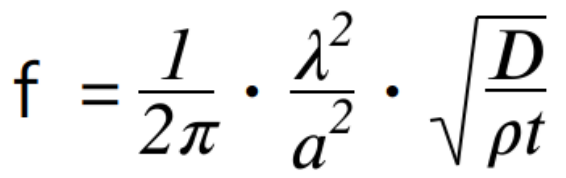
・・・(52)
λ2=35.99(1次)、73.41(2次)、108.3(3次)、131.6(4次)、132.2(5次)
a:板の1辺の長さ[0.5m]
D:曲げ剛性(式(2)と同じ) [E=7*10^10Pa][ν=0.3](Scilabの計算でもこの値を使用)
ρ:密度[2800kg/m3](Scilabの計算でもこの値を使用)
t:板厚[0.0005m] 補足となりますが10x10マスを更に増やしていくと更に緻密な描写が得られますが、これ以上マスを細かくしていくとPCの性能上メモリーオーバーでハングしてしまいます。当面、当事業所での解析はこのレベルが限界となります。
以上の計算で固有振動数及びその時の形状を解析で得てきました。実際の現場では更に動的な変化が重要となります。そこでこちら(Deail2)にて動的挙動解析を検討してみます。
参考文献
[1]機械構造 振動学 MATALBによる有限要素法と応答解析 小松敬冶 著 森北出版株式会社
[2]機械振動学 岩田佳雄・佐伯暢人・小松崎俊彦 共著 数理工学社
